参考材料📚
1.用于RISC-V架构的中断系统(专利)
2.Bumblebee内核指令架构手册(技术文档)
Bumblebee非矢量中断处理流程和jalmnxti寄存器
csrrw ra,CSR_JALMNXTI,ra指令的编程模型如下
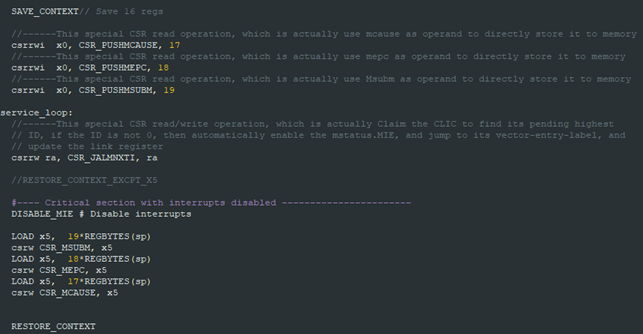
首先保存上下文,包含部分通用寄存器和mcause等csr寄存器。
并且当中断处理函数执行完成后,不使用mret指令返回,而是以被调用的函数的形式返回(即返回到ra寄存器保存的地址),那么相当于又会回到该特殊指令执行,判断是否还需要处理中断。
除了jalmnxti,bumblebee还有mtvt和mtvt2寄存器
mtvec:没有变化,存储着广义异常的入口地址。
mtvt:mtvt 寄存器用于保存 ECLIC 中断向量表的基地址
mtvt2:如果配置 CSR 寄存器 mtvt2 的最低位为1,则所有非向量中断共享的入口地址由 CSR 寄存器 mtvt2 的值(忽略最低 2 位的值)指定。为了让中断以尽可能快的速度被响应和处理,推荐将 CSR 寄存器 mtvt2 的最低位设置为 1,即,由 mtvt2指定一个独立的入口地址供所有非向量中断专用,和异常的入口地址(由 mtvec 的值指定)彻底分开。
总之,中断咬尾时,mtvt中保存着中断向量表的地址,mtvt2中保存非向量中断的公共入口。
方案
首先处理器工作在非矢量模式下,但是软件仍然使用一个中断向量表,中断ISR不保存上下文。当执行csrrw ra,CSR_JALMNXTI,ra指令时,查询pending信号以及对应的中断ID号,硬件跳转到对应的ISR,并且向ra寄存器写入这条指令的PC。ISR结束时以执行函数返回的指令,此时硬件会返回到ra寄存器保存的地址,也就是返回该指令,再次查询对应的中断,直到所有当前正在等待的中断全部完成。
关于指令本身的实现细节:
1.首先查询plic给出的中断号是否为0(不确定,也许可以看有没pending),如果不是0,那么打开中断使能MIE。
2.实现jal指令的功能,跳转到mvtec+4id,写ra寄存器为当前pc值。
3.修改几个中断相关的csr寄存器,这是以调用函数的形式触发了中断,因此要自行修改csr。(关注interrupt_ctrl模块中的trap_index信号)
备忘
1.Prism的CSR寄存器module中包含trap_entry_en和trap_exit_en信号,有没有必要改?主动进入中断是否要修改这两个信号?